
ترکیب بازوی مصنوعی و یادگیری ماشینی برای کمک به مبتلایان به فلج اندام
پژوهشگران سوئیسی، یک سیستم مبتنی بر یادگیری ماشینی را با یک بازوی مصنوعی ادغام کردهاند تا به افراد مبتلا به فلج اندام در برداشتن اشیا کمک کنند.
به گزارش هفته نامه پزشکی امروز به نقل از ایسنا
و به نقل از نقل از تککرانچ، اندامهای مصنوعی، سالانه در حال پیشرفت هستند اما قدرت و دقت به کار رفته در آنها، همیشه به استفاده ساده و موثر منجر نمیشود زیرا افراد مبتلا به فلج اندام، توانایی کنترل اندام مصنوعی را فقط در سطح پایه دارند. پژوهشگران سوئیسی سعی دارند برای برطرف کردن این مشکل، از هوش مصنوعی در کنترل اندام مصنوعی استفاده کنند.
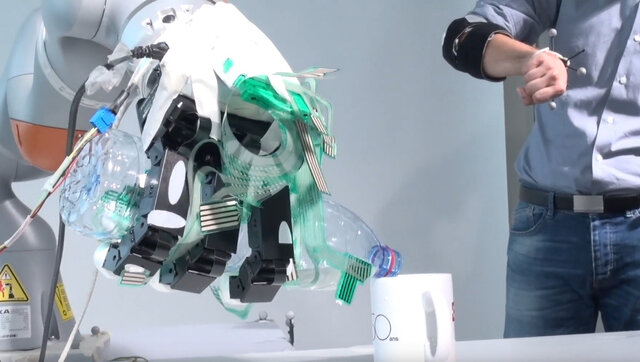
فردی را تصور کنید که دست او از قسمت آرنج قطع شده و یک اندام مصنوعی هوشمند را با قسمت بالای آرنج خود کنترل میکند. چنین افرادی میتوانند با کمک حسگرهایی که در عضلات آنها نصب شده، بازوی خود را به سادگی حرکت دهند و آن را در جهت مناسب به کار بگیرند تا اشیا را از روی میز بردارند.
بسیاری از عضلات و تاندونهایی که انگشتان را کنترل میکنند، از بین رفتهاند و اگر برداشتن و رها کردن اشیا، تنها قابلیتی باشد که اندام مصنوعی برای کاربر فراهم میکند، بسیاری از مزایای دست مصنوعی را نخواهند داشت.
پژوهشگران "مؤسسه پلیتکنیک فدرال لوزان"(EPFL) تلاش کردهاند تا از پس چنین مشکلاتی برآیند. اگر دست مصنوعی بتواند حرکاتی که دست واقعی به صورت خودکار انجام میدهد، شناسایی کند، محدودیتهای یک اندام مصنوعی را نخواهد داشت. تلاش پژوهشگران این است تا امکان شناسایی خودکار روش برداشتن اشیا را برای دست مصنوعی فراهم کنند تا با چنین شرایطی سازگار باشد.
ایده پژوهشگران این است که کاربران اندام مصنوعی، یک مدل یادگیری را آموزش دهند تا بتواند سیگنالهای ارسال شده از عضلات آنها را هنگام داشتن حرکات متفاوت، بررسی کند. دست رباتیک با کمک این اطلاعات ابتدایی میتواند تشخیص دهد که باید چه جسمی را بر دارد و با بررسی محیطی که با آن در تماس است، بهترین تلاش را در زمان واقعی ارائه دهد. دست مصنوعی میتواند در برابر افتادن اشیا مقاومت کند و در صورت ایجاد لغزش، در کمتر از نیمی از ثانیه، دوباره از عهده کنترل جسم برآید.
دست مصنوعی با وجود این قابلیتها میتواند اجسام را محکم نگه دارد تا کار کاربر با آن تمام شود و سپس، آنها را به جای خود بازگرداند؛ بدین ترتیب، کاربر میتواند فنجان چای و قهوه خود را با دست مصنوعی بردارد و پس از نوشیدن، آن را دوباره سر جای خود بگذارد. سیستم کلی دست مصنوعی میتواند تغییر سیگنالهای عضلات را هنگام انجام دادن چنین کارهایی احساس کند.
این سیستم که روی یک بازوی رباتیک به کار گرفته شده، هنوز در مراحل آزمایشی به سر میبرد و تنظیمات آن به درستی انجام نشده است اما این روش کنترل، بسیار امیدوارکننده به نظر میرسد و در صورت موفقیت میتواند گام مهمی برای شکلگیری نسل آینده اندام مصنوعی هوشمند به شمار رود.
این پژوهش، در مجله "Nature Machine Intelligence" به چاپ رسید.
انتهای پیام
برچسب ها
مطالب مرتبط













ثبت نظر